❖ Neato Robotics Street View
(computational robotics course, four-person team)
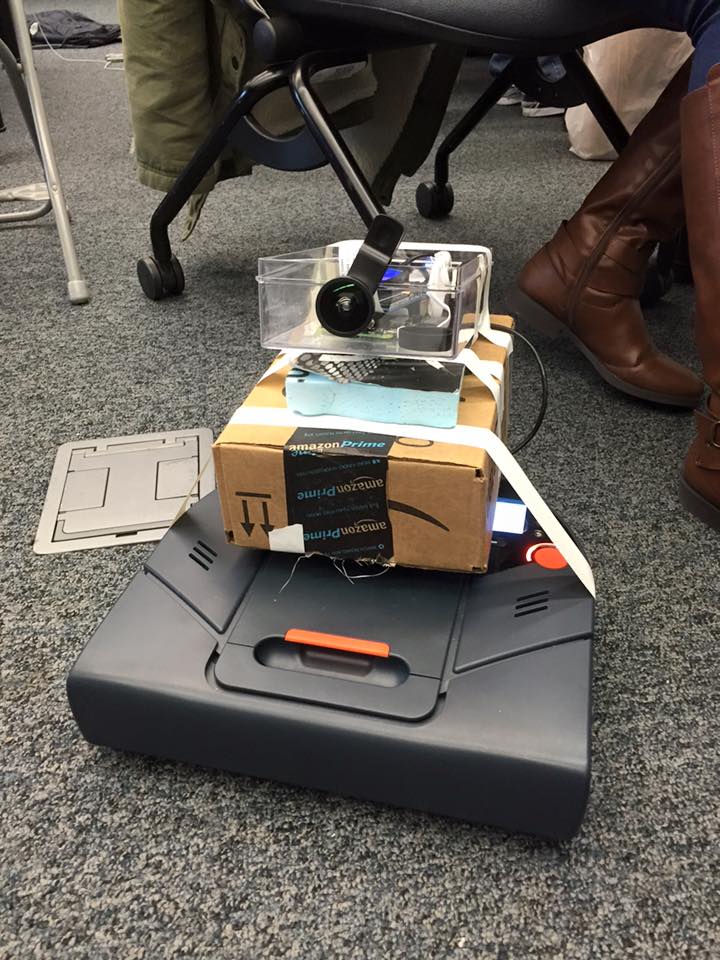
- Computational Robotics Final Project -Developing interactive map of Olin building floor with panoramic images, using SLAM and computer vision.
- Self-made “Google street 3D view” on campus with a vacuum robot in Python and JavaScript
- Implement SLAM (simultaneous localization and mapping) algorithm with our version of particle filter localization method. Use that algorithm to navigate robots around for data collecting
- Create panorama view of multiple locations by image-stitching in OpenCV; Develop a web interface for users;
Slam Algorithm Code Link
Reflection Video Link



Combine Robot with Art
(Personal extensional part)
Because besides implementing the slam algorithm I was also mainly in charge of building the panorama part of the project, I continue to combine that with my oil painting art together.




Relevant Photos